ROS不仅是教学工具,更是机器人领域的前沿技术试验场。研学的深层目标之一是通过ROS快速验证新算法、探索新场景,推动技术落地:
前沿算法复现:ROS的模块化设计允许研究者快速集成深度学习(如用PyTorch训练目标检测模型,通过ROS节点输出结果)、强化学习(如用ROS控制机械臂完成抓取任务)等前沿技术,降低算法验证门槛。
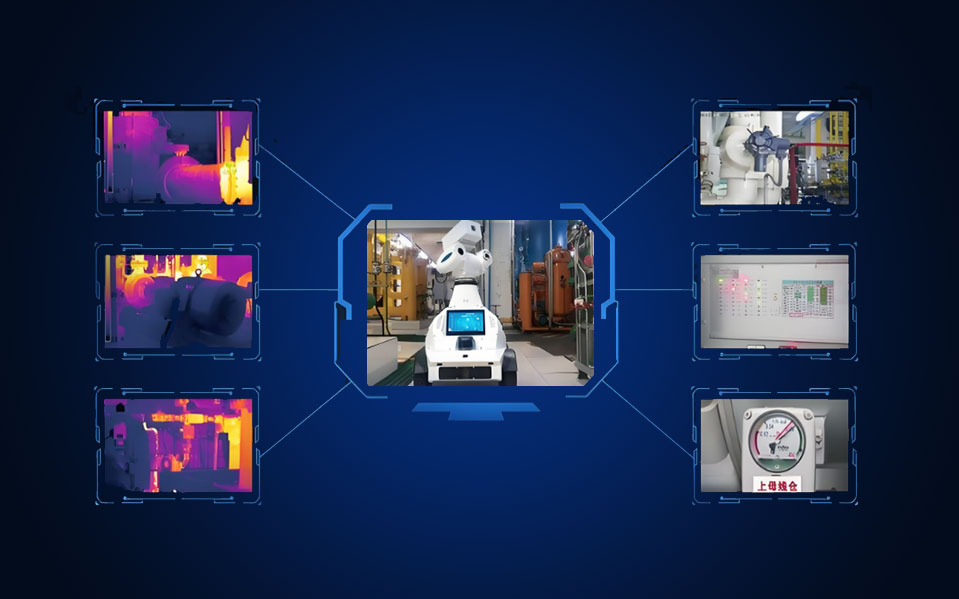
行业场景适配:通过ROS开发特定行业的机器人解决方案(如仓储AGV的导航、服务机器人的语音交互、医疗机器人的手术辅助),理解不同场景对可靠性、实时性、安全性的特殊需求。
开源生态参与:ROS拥有全球最大的机器人开发者社区(如ROS Discourse、GitHub开源项目),研学过程中参与社区贡献(如修复功能包Bug、提交新功能PR),能直接接触行业最新进展,甚至推动技术标准的制定。
通过对接前沿,学习者不仅能掌握现有技术,更能具备“引领技术创新”的潜力。